(一) 形状判别机械手设备概述
形状判别机械手是一套控制性强的形状判别的一套装置。系统各机构的采用了气动驱动、交流伺服电机驱动等控制技术;系统的控制方式采用一台PLC承担其控制任务,从而组成自动完成产品搬运的流水线工作。该实训装置采用传感检测、控制、执行与驱动等机构在微处理单元的控制下协调有序地工作,有机地融合在一起。
可编程序控制器(PLC)以其高抗干扰能力、高可靠性、高性能价格比且编程简单而广泛地应用在现代化的自动生产设备中,担负着生产线的大脑――微处理单元的角色。PLC是在传统的顺序控制器的基础上引入了微电子技术、计算机技术、自动控制技术和通讯技术而形成的一代新型工业控制装置,目的是用来取代继电器、执行逻辑、记时、计数等顺序控制功能,建立柔性的程控系统。它采用可编程序的存贮器,用来在其内部存贮执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或生产过程。可编程序控制器及其有关设备,都应按易于与工业控制系统形成一个整体,易于扩充其功能的原则设计。
形状判别机械手装置教学系统的设计完全符合工业电气柜的设计模式,该电气面板由我们公司从事多年工业电气柜的工程师设计,是为提高学生动手能力和实践技能、生产的一套实用性实验设备。对实训的学生来说,具备了更强的现场认知模型。实验装置的网板采用网孔面板,所有元器件均固定在网板上面。视觉上更直观,搬运轻便,组装简单。在学生安全操作方面也做了多重保护,控制电压均采用DC 24V安全电压,确保学生在实验中的人身安全。
(二) 技术指标
1. 输入电压:AC 220V 50Hz 4A
2. 执行驱动电压:DC24V/4.5A
3. 环境温度:-10-55℃(工作) -20-70℃(保存)
4. 相对湿度:35-85%(无冷凝)
5. 接地:第三种接地
6. 工作环境:禁止腐蚀性,可燃性气体接触,防止导电尘埃
具有电压型漏电保护装置和电流型漏电保护装置,安全性符合相关的国家标准。
(三) 设备特点
1、专业性:该装置均采用当前工业系统常用的现代化控制器件、连接设备以及专业的设计理念。
2、全面性:覆盖了传感器技术、气动技术、PLC技术、电机驱动技术、计算机组态技术、机械系统精密传动技术等多项技术实训。
3、综合性:不但能提升学生的专业技能,同时可以培养学生的动手能力、团队协助能力、综合问题的分析和解决能力。
4、开放型:该实验装置所有电器控制端口均通过安全插座接与接线端子之上,方便学员根据学习需要自己接线、编程和调试,机械装备上亦从方便学员动手拆装出发,设计出适合于学员进行拆卸和组装的相关练习。
5、安全性:具有电压型漏电保护装置和电流型漏电保护装置,安全性符合相关的国家标准,同时备急停保护、限位保护等各种保护功能,可确保人身与设备安全。
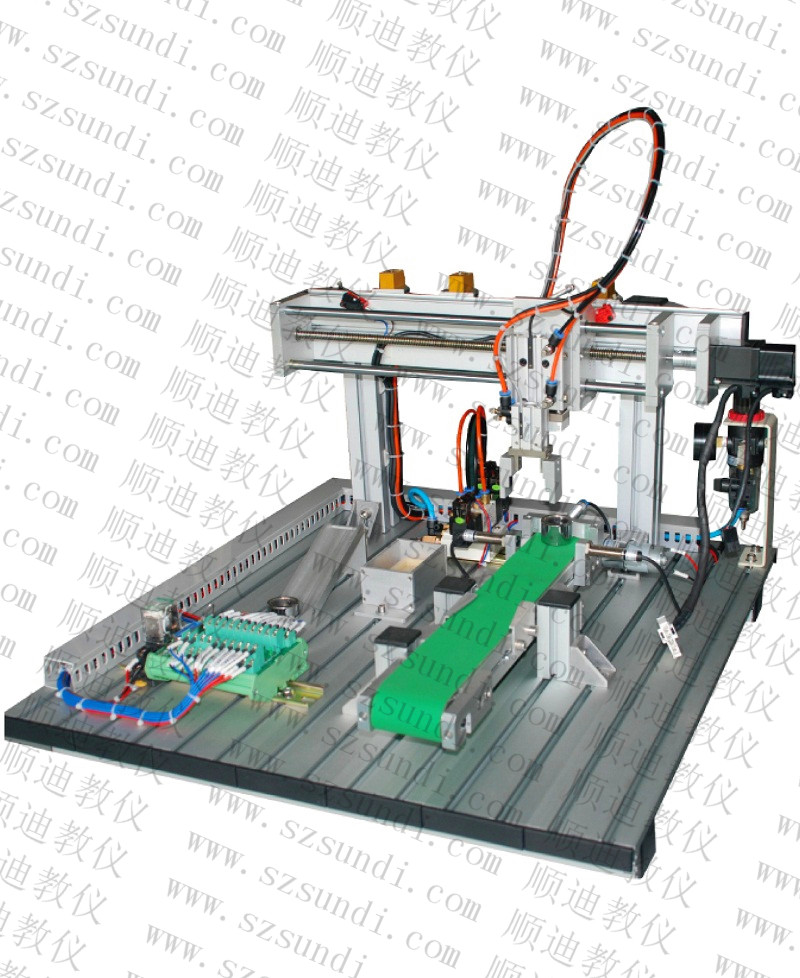
(四)设备组成
机械手主要由以下几个部分构成:分别是电气控制面板、铝型材台面、机械手控制系统、传送单元、料仓、辅助元件等组成。
1、 电气控制面板
电气控制元件安装在斜置式金属网孔板之上(600×700mm),主要包括DC 24V开关电源、FX2N 32MT 可编程控制器、接线端子排、按钮控制盒(含急停、上电、开始、复位、报警等)。电气元件按照工业设计要求固定在网控板上,便于拆装调试。
2、 铝型材台面
采用工业铝型材拼装而成,长×宽=600×560mm,该判别机械手的机械部件及相关辅件均固定其上。
3、 机械手控制系统
采用龙门式固定结构,铝型材支架固定。由日本富士交流伺服电机及其驱动器控制X轴做水平方向的位移控制,采用丝杆驱动,有效行程不低于300mm;Z轴由气缸驱动,行程不低于50mm,控制机械手在垂直方向作伸缩运动;气动夹爪一个,含夹具,能完成圆形工件和方形工件的分层夹取。系统包含原点传感器一个、位置校验传感器2个、限位开关两个。
4、 传送单元
由工业铝型材支架固定,包含导向装置、定位装置、形状判别传感器、工件到位检测传感器、直流减速电机等。传送带规格:长×宽×厚=850×60×2mm。
5、料仓:方型料仓和圆形料仓各一个,采用金属材料。
6、辅助元件:包含气动三联件、电磁阀、接线端子排、继电器、I/O转接板、漏电保护开关、线槽等。
(五)培训内容
1、气动系统的安装与调试项目:
气动机械手装置的安装;气动方向控制回路的安装;气动速度控制回路的安装;了解气动元件的使用及气动控制回路。
2、PLC接线与编程软件的学习项目:
系统接线的实训项目,电机正反转控制电路的连接与控制程序编写;电机调速控制电路的连接与控制程序编写;气动方向控制程序编写;气动顺序动作控制程序编写;气动机械手控制程序编写;二维综合实验板设备控制程序编写。
3、电机驱动器的使用项目:
学习电机驱动器的用途;熟悉驱动器主要参数的功能;了解驱动器控制端的多功能带驱动、方向、限位等功能;掌握电机驱动器与电机的接线。
4、电气控制电路的安装和PLC程序编写项目:
PLC基本指令的学习、编写与调试;电动机正反转控制电路的连接与控制程序编写;电动机调速控制电路的连接与控制程序编写;实验平台顺序动作控制程序编写;气动方向控制程序编写;气动机械手控制程序编写;综合实验板的控制程序编写。
5、机械构件的装配与调整能力;机电设备的安装与调试能力;电路安装能力;气动系统的安装与调试能力;熟悉电机运动过程中,限位开关的保护作用;机电一体化设备的控制程序的编写能力;自动控制系统的安装与调试能力。